作者信息:
莫冬炎,2016级,自动化专业
指导教师信息:
黄伟锋,副教授,研究方向:自动化、农业机器人
项目简介:
本系统基于RTK定位技术,研发一个终端显示器,利用STM32单片机通过串口进行数据传输,使测量数据在终端显示器上实时显示出来。RTK定位技术运用了载波相位差分技术,使得测量的数据比其他定位技术更具有说服力,有精确的定位数据,导航的精确度也大大提高,从而满足了精准农业中对于定位技术的需求。使用qt开发终端显示应用,并与百度服务器进行交互,相关数据可实时展示,同时测量的定位数据可在百度地图上进行绘制,便于后续的研究工作。
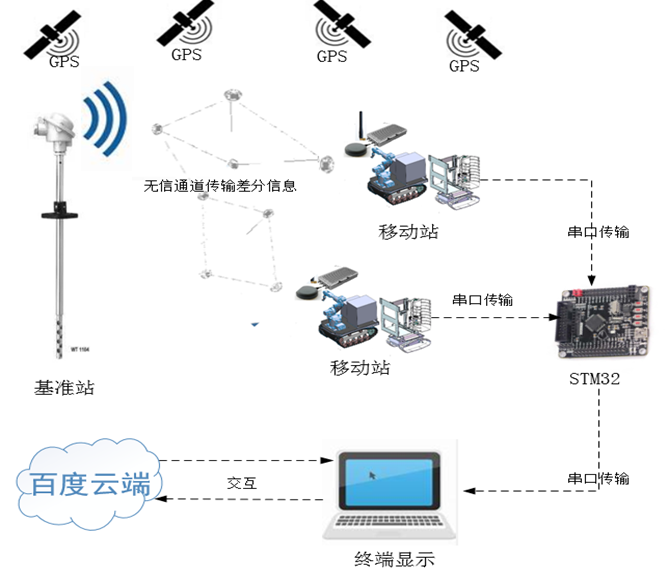
图1 本系统总体结构
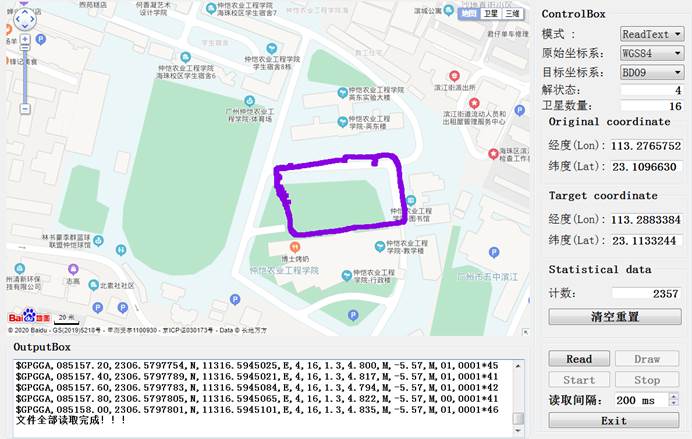
图2 本系统终端展示效果-仲恺英东楼
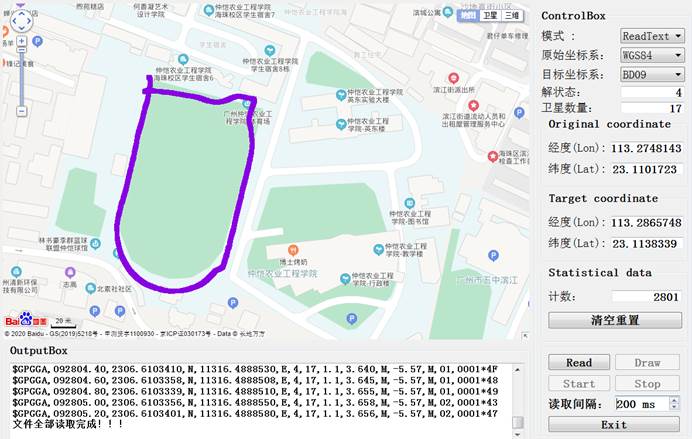
图3 本系统终端展示效果-仲恺体育场